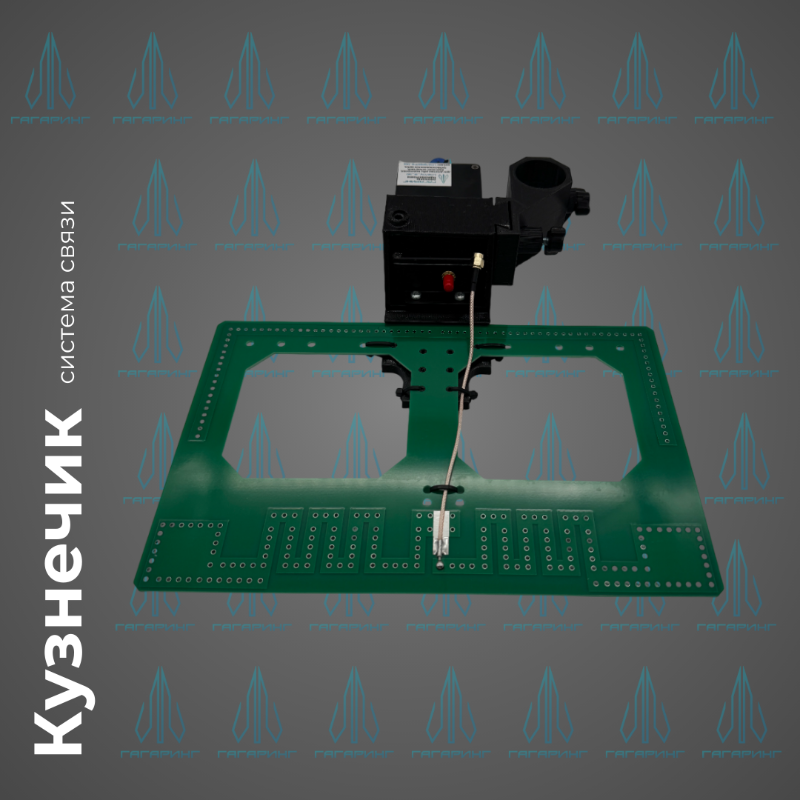
Система связи "КУЗНЕЧИК"
25.02.2026 г. в 00:00
121
1 мин
ОПИСАНИЕ И РАБОТА
1.1. Назначение
Система связи «Кузнечик» предназначена для управления FPV дронами, дронами самолетного типа, а также наземными и водными платформами. Передатчик аппаратуры управления может как подключаться к пульту управления через вынос «Нить», так и работать как ретранслятор при установке на плату любого приемника, работающего по протоколу CRSF. Система может работать в одном диапазоне или в двух различных диапазонах частот, для чего на плате передатчика предусмотрена установка двух передающих модулей, а приемники системы поддерживают совместную работу с автоматическим выбором источника актуальных сигналов управления.
1.2. Преимущества системы
Поддержка одного или двух рабочих диапазонов;
- Вынос передатчика до 1000м по витой паре (с локальным питанием) и до 20км по оптике;
- Программное обеспечение и оригинальный протокол собственной разработки с ППРЧ, шифрованием и защитой от перехвата управления;
- Физический уровень – LoRa с частотой пакетов 25 Гц, обеспечивающий большую дальность и помехоустойчивость при сравнительно небольшой мощности передатчика;
- Отключение передачи при потере сигналов управления, что позволяет экономить заряд батареи в режиме ретрансляции и усложнить работу службе РЭР противника;
- Для наземных и водных платформ предусмотрен режим с пониженной частотой пакетов, позволяющий увеличить дальность связи без ретранслятора;
- Для снижения риска обнаружения местонахождения передатчика, предусмотрена регулировка с пульта мощности;
- Легкая привязка приемника к передатчику и сброс привязки одной кнопкой;
- Возможность настройки ширины ППРЧ и разноса частот каналов под параметры используемых антенн;
- Автоматическая генерация новых ключей при сбросе настроек передатчика;
- Генерация новой последовательности ППРЧ при включении передатчика;
- Автоматический выбор источника сигнала управления передатчиком (1-проводный CRSF пульта, RS-485 «Нить», CRSF выход приемника), что исключает необходимость в переключателях и настройках перед использованием и позволяет использовать свободный передатчик для имитации работы расчета;
- Режим «подхват», когда взлет и вывод в рабочий район производится с одного пульта, а непосредственное наведение на цель с другого;
- Изменение настроек передатчика через обычный Луа-скрипт ЕЛРС (не требуется обновления скрипта при появлении у оборудования новых возможностей);
- Имеется исполнение передатчика в виде стандартного JR модуля для использования в ретрансляторах и НСУ;
- Возможность синхронной смены частоты видеопередатчика и видеоприемника «Сова» во время полета при подавлении видеоканала
- Целевой помехой; - обновление ПО передатчика и приемника у потребителя через адаптеры USB-RS485 и USB-TTL.